For the past week, the team have modified the current rail and the current pick up mechanism.

 the figure above is the latest design
the figure above is the latest design







The figure above represent last year design.
 the figure above is the latest design
the figure above is the latest design
The figure on the right is the mechanism that will make contact with the electric current rail. the legs (L-shaped) are design to fit the the width of the overall Guideway track.
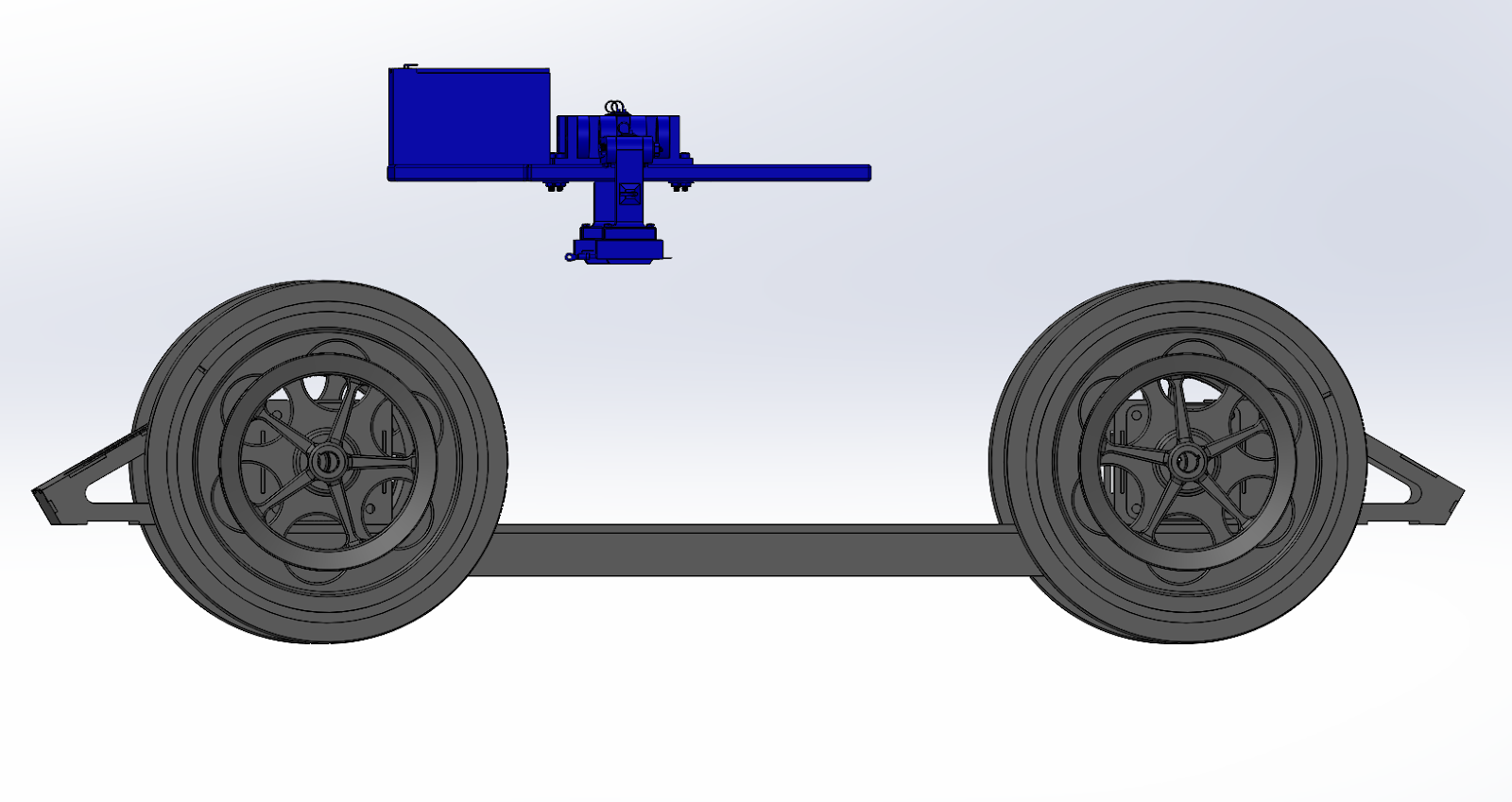
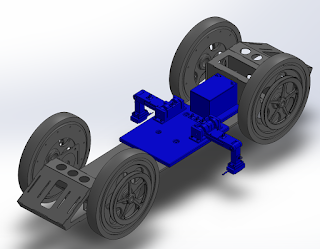
the following figures represent the location of the mechanism on the slave bogie and will also hold the Ultracapacitor bank right above



the current rail have been modified to meet the latest constrains form other team. for example the Guideway will have limited track therefore it was necessary to built an additional track for our mechanisms to function.
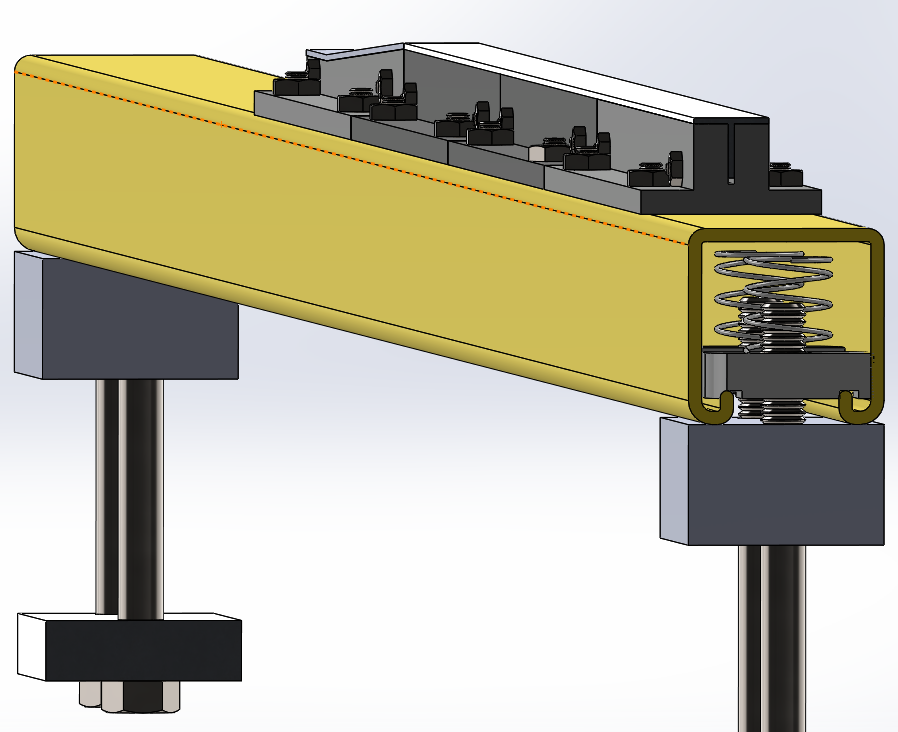
The latest current rail design have been modified as well to have a slope for the current pick up mechanism to make contact with the carbon brush

since we are designing a passive current pick up mechanism that does not required external power, we are relying on height and weight to make contact with the rail. Moreover, last years research shows that on higher voltage the carbon brush can pick up current with less than 50 N force contact, in fact it was need approximately 1kg weight or 10 N force

Comments
Post a Comment